|
|

|

|
| e-Pub |
Section: New Results
Physically-Based Simulation and Haptic Feedback
Design of haptic guides for pre-positioning assistance of a comanipulated needle
Participant : Maud Marchal [contact] .
In minimally-invasive procedures like biopsy, the physician has to insert a needle into the tissues of a patient to reach a target. Currently, this task is mostly performed manually and under visual guidance. However, manual needle insertion can result in a large final positioning error of the tip that might lead to misdiagnosis and inadequate treatment. A way to solve this limitation is to use shared control; a gesture assistance paradigm that combines the cognitive skills of the operator with the precision, stamina and repeatability of a robotic or haptic device. In this paper, we propose to assist the physician with a haptic device that holds the needle and generates mechanical guides during the phase of manual needle pre-positioning. In the latter, the physician has to place the tip of the needle on a planned entry point, with a pre-defined angle of incidence. From this pre-operative information and also from intra-operative measurements, we propose to generate haptic cues, known as virtual fixtures, to guide the physician towards the desired position and orientation of the needle. It takes the form of five haptic guides, each one implementing virtual fixtures. We conducted a user study where those guides were compared to the unassisted reference gesture. The most constraining guide, in terms of assisted degrees of freedom, was highlighted as the one that provides the best results in terms of performance and user experience [20], [21].
This work was done in collaboration with the Inria Rainbow team.
An Interactive Physically-based Model for Active Suction Phenomenon Simulation
Participants : Antonin Bernardin, Maud Marchal [contact] .
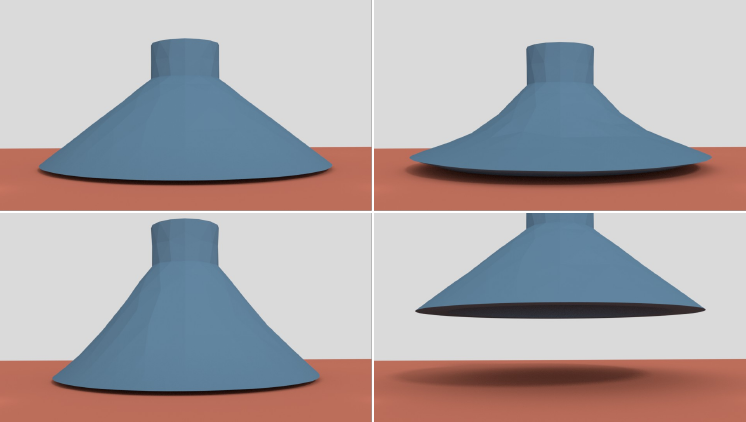
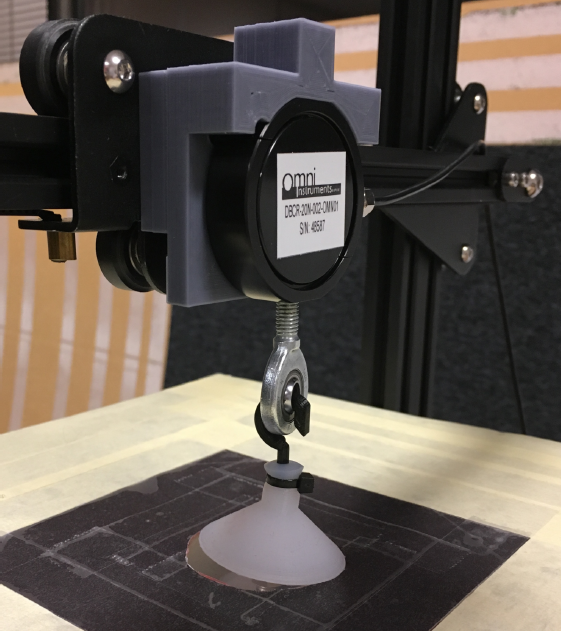
While suction cups are widely used in Robotics, the literature is underdeveloped when it comes to the modelling and simulation of the suction phenomenon (see Figure 10). In this work, we present a novel physically-based approach to simulate the behavior of active suction cups. Our model relies on a novel formulation which assumes the pressure exerted on a suction cup during active control is based on constraint resolution. Our algorithmic implementation uses a classification process to handle the contacts during the suction phenomenon of the suction cup on a surface. Then, we formulate a convenient way for coupling the pressure constraint with the multiple contact constraints. We propose an evaluation of our approach through a comparison with real data, showing the ability of our model to reproduce the behavior of suction cups. Our approach paves the way for improving the design as well as the control of robotic actuators based on suction cups such as vacuum grippers.
This work was done in collaboration with the Inria Defrost team.
|
How different tangible and virtual objects can be while still feeling the same?
Participants : Xavier de Tinguy, Anatole Lécuyer, Maud Marchal [contact] .
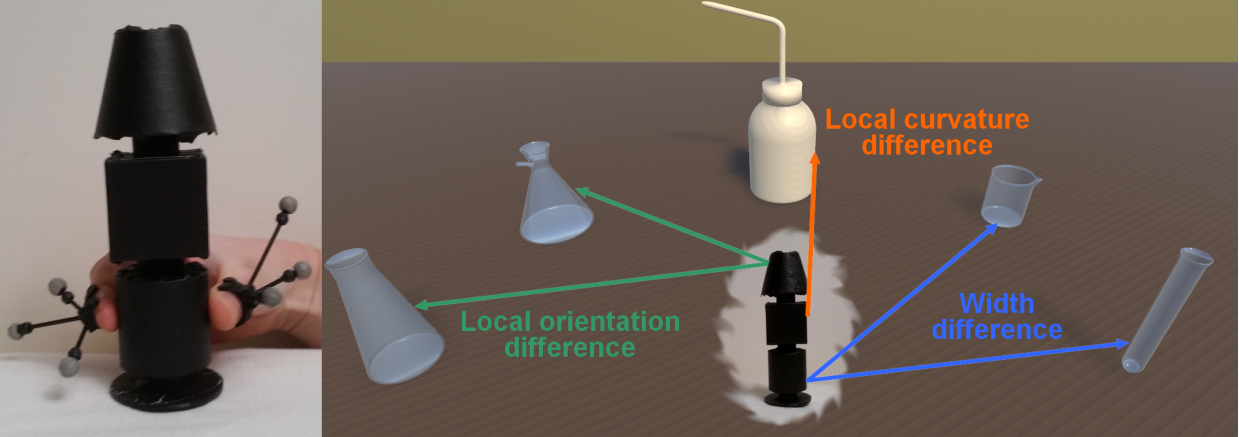
Tangible objects are used in Virtual Reality to provide human users with distributed haptic sensations when grasping virtual objects. To achieve a compelling illusion, there should be a good correspondence between the haptic features of the tangible object and those of the corresponding virtual one, i.e., what users see in the virtual environment should match as much as possible what they touch in the real world. This work [14] aims at quantifying how similar tangible and virtual objects need to be, in terms of haptic perception, to still feel the same. As it is often not possible to create tangible replicas of all the virtual objects in the scene, it is important to understand how different tangible and virtual objects can be without the user noticing (see Figure 11). This paper reports on the just-noticeable difference (JND) when grasping, with a thumb-index pinch, a tangible object which differ from a seen virtual one on three important haptic features: width, local orientation, and curvature. Results show JND values of 5.75%, 43.8%, and 66.66% of the reference shape for the width, local orientation, and local curvature features, respectively. These results will enable researchers in the field of Virtual Reality to use a reduced number of tangible objects to render multiple virtual ones.
This work was done in collaboration with the Inria Rainbow team.
|
Toward Universal Tangible Objects
Participants : Xavier de Tinguy, Maud Marchal, Anatole Lécuyer [contact] .
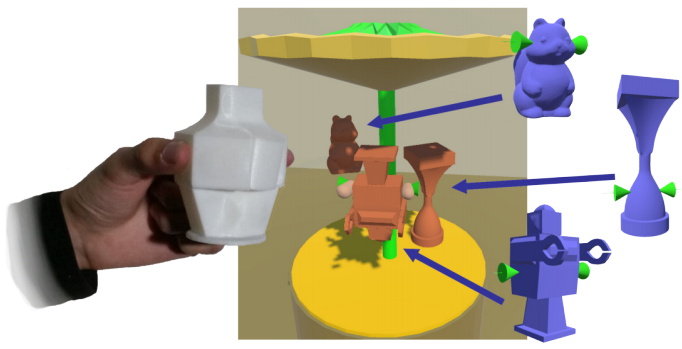
Tangible objects are a simple yet effective way for providing haptic sensations in Virtual Reality. For achieving a compelling illusion, there should be a good correspondence between what users see in the virtual environment and what they touch in the real world. The haptic features of the tangible object should indeed match those of the corresponding virtual one in terms of, e.g., size, local shape, mass, texture. A straightforward solution is to create perfect tangible replicas of all the virtual objects in the scene. However, this is often neither feasible nor desirable. This work [15] presents an innovative approach enabling the use of few tangible objects to render many virtual ones (see Figure 12). The proposed algorithm analyzes the available tangible and virtual objects to find the best grasps in terms of matching haptic sensations. It starts by identifying several suitable pinching poses on the considered tangible and virtual objects. Then, for each pose, it evaluates a series of haptically-salient characteristics. Next, it identifies the two most similar pinching poses according to these metrics, one on the tangible and one on the virtual object. Finally, it highlights the chosen pinching pose, which provides the best matching sensation between what users see and touch. The effectiveness of our approach is evaluated through a user study. Results show that the algorithm is able to well combine several haptically-salient object features to find convincing pinches between the given tangible and virtual objects.
This work was done in collaboration with the Inria Rainbow team.
|
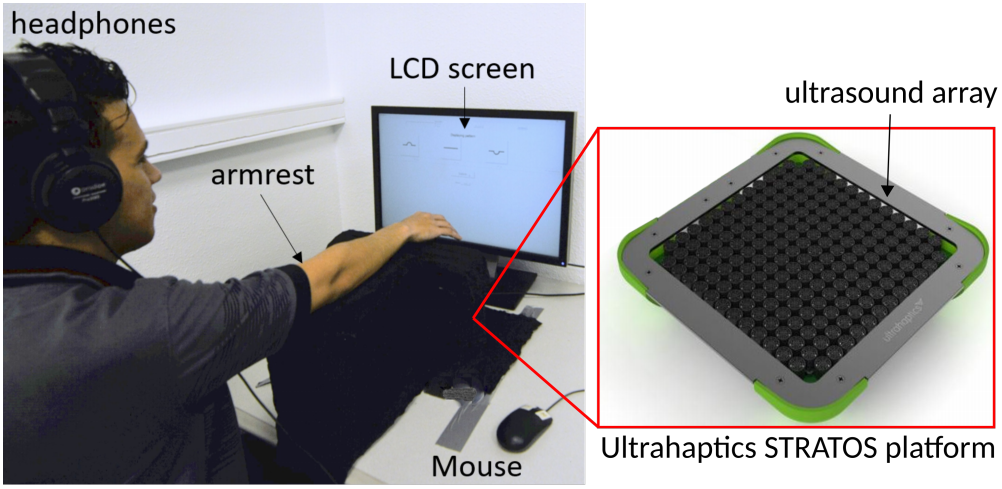
Investigating the recognition of local shapes using mid-air ultrasound haptics
Participants : Thomas Howard, Gerard Gallagher, Anatole Lécuyer, Maud Marchal [contact] .
Mid-air haptics technologies are able to convey haptic sensations without any direct contact between the user and the haptic interface. One representative example of this technology is ultrasound haptics, which uses ultrasonic phased arrays to deliver haptic sensations. Research on ultrasound haptics is only in its beginnings, and the literature still lacks principled perception studies in this domain. This work [22] presents a series of human subject experiments investigating important perceptual aspects related to the rendering of 2D shapes by an ultrasound haptic interface (the Ultrahaptics STRATOS platform, see Figure 13). We carried out four user studies aiming at evaluating (i) the absolute detection threshold for a static focal point rendered via amplitude modulation, (ii) the absolute detection and identification thresholds for line patterns rendered via spatiotemporal modulation, (iii) the ability to discriminate different line orientations, and (iv) the ability to perceive virtual bumps and holes. These results shed light on the rendering capabilities and limitations of this novel technology for 2D shapes.
This work was done in collaboration with the Inria Rainbow team.
|
Touchy: Tactile Sensations on Touchscreens Using a Cursor and Visual Effects
Participants : Antoine Costes, Ferran Argelaguet, Anatole Lécuyer [contact] .
Haptic enhancement of touchscreens usually involves vibrating motors that produce limited sensations or custom mechanical actuators that are difficult to widespread. In this work, we propose an alternative approach called “Touchy” to induce haptic sensations in touchscreens through purely visual effects [3]. Touchy introduces a symbolic cursor under the user’s finger which shape and motion are altered in order to evoke haptic properties. This novel metaphor enables to address four different perceptual dimensions, namely: hardness, friction, fine roughness and macro roughness. Our metaphor comes with a set of seven visual effects that we compared with real texture samples within a user study conducted with 14 participants. Taken together our results show that Touchy is able to elicit clear and distinct haptic properties: stiffness, roughness, reliefs, stickiness and slipperiness.
This work was achieved in collaboration with InterDigital.
Investigating Tendon Vibration Illusions
Participants : Salomé Lefranc [contact] , Mélanie Cogné, Mathis Fleury, Anatole Lécuyer.
Illusion of movement induced by tendon vibration can be useful in applications such as rehabilitation of neurological impairments. In [40], we investigated whether a haptic proprioceptive illusion induced by a tendon vibration of the wrist congruent to the visual feedback of a moving hand could increase the overall illusion of movement. Tendon vibration was applied on the non-dominant wrist during 3 visual conditions: a moving virtual hand corresponding to the movement that the subjects could feel during the tendon vibration (Moving condition), a static virtual hand (Static condition), or no virtual hand at all (Hidden condition). There was a significant difference between the 3 visual feedback conditions, and the Moving condition was found to induce a higher intensity of illusion of movement and higher sensation of wrist’s extension. Therefore, our study demonstrated the potentiation of illusion by visual cues congruent to the illusion of movement. Further steps will be to test the same hypothesis with stroke patients and use our results to develop EEG-based Neurofeedback including vibratory feedback to improve upper limb motor function after a stroke.
This work was achieved in collaboration with CHU Rennes and Inria EMPENN team.